私たちミカワエンジニアリングでは、創立以来今までに約6,000セットの自動化システムをつくりました。ノウハウや知識、経験を持ったエンジニアたちがお客様のご要望に合わせてオーダーメイドで開発を行なっております。長く安心して使うことができ、納品後もアフターフォローや教育も提案しています。
▼見たい製品名をクリックしてください
![]()
![]()
PRODUCT
私たちミカワエンジニアリングでは、創立以来今までに約6,000セットの自動化システムをつくりました。ノウハウや知識、経験を持ったエンジニアたちがお客様のご要望に合わせてオーダーメイドで開発を行なっております。長く安心して使うことができ、納品後もアフターフォローや教育も提案しています。
▼見たい製品名をクリックしてください
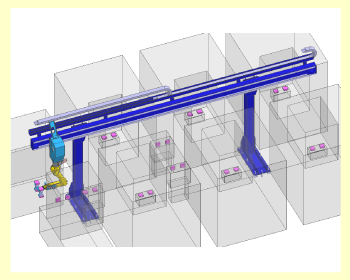
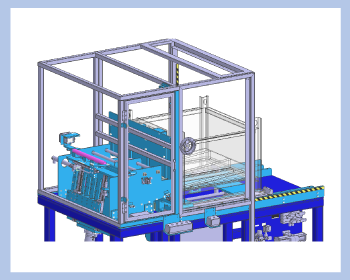
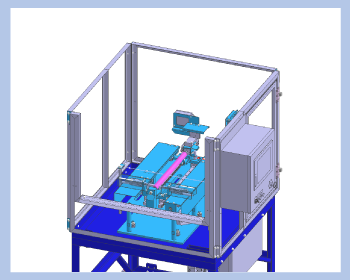
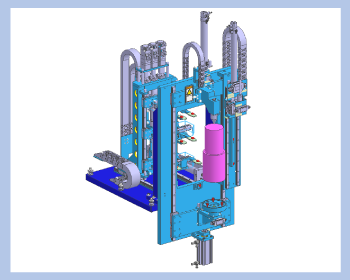
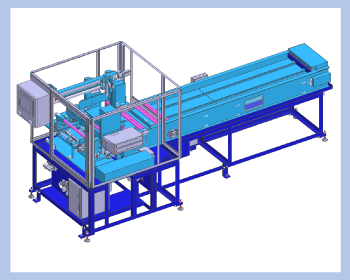
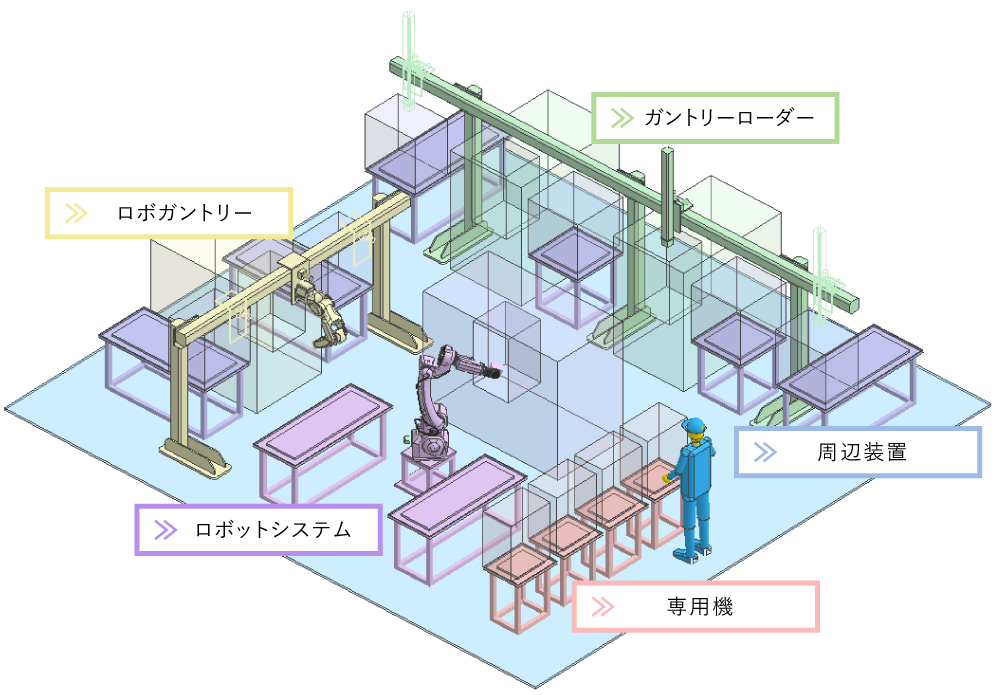
(門型のワーク搬送装置)
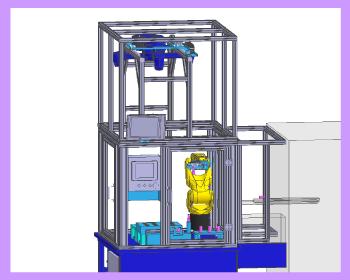
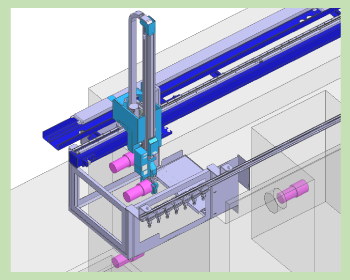
| 実施例1 2軸ガントリーローダー |
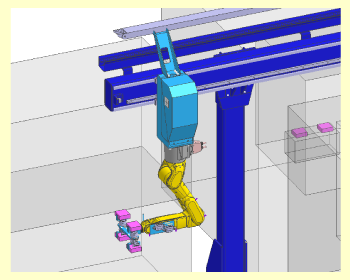
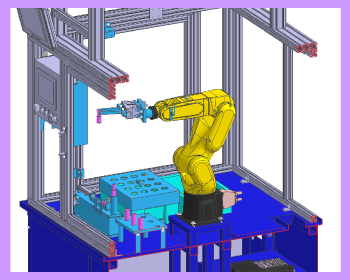
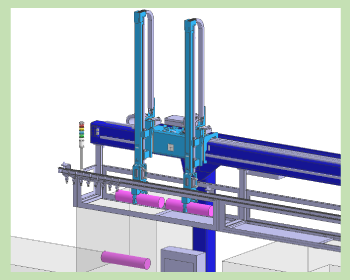
実施例2 2アームガントリーローダー |
 |
 |
| 横行軸・上下軸 スイング式ダブルハンド (5kg×2ヶ可搬) |
横行軸・上下軸×2 シングルハンド×2 (20kg×2ヶ可搬) ※ハンドチェンジのスペースが無い場合に対応出来ます。 |
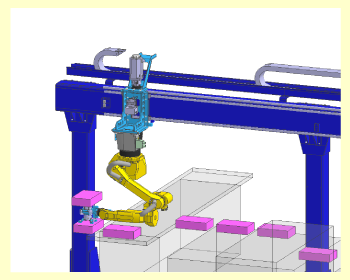
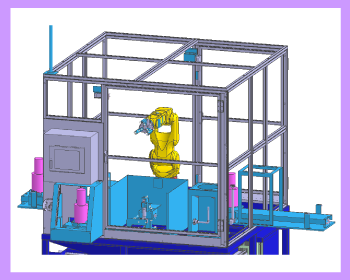
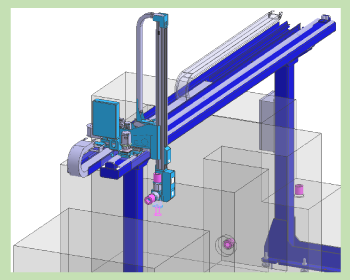
| 実施例3 3軸ガントリーローダー |
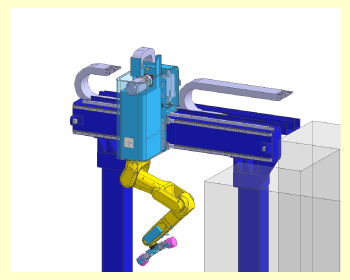
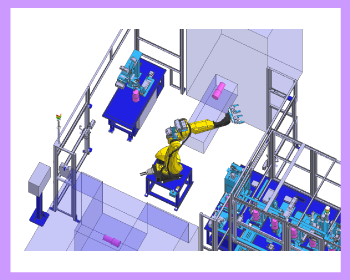
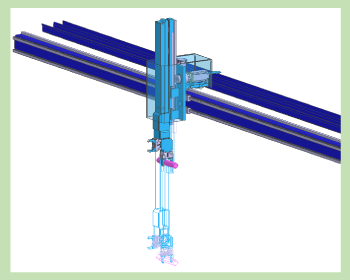
実施例4 上下テレスコ式ガントリーローダー |
 |
 |
| 横行軸・上下軸・前後軸 ロータリ式ダブルハンド (3kg×2ヶ可搬) ※複数装置の前後搬送ラインの違いに対応出来ます。 |
横行軸・上下軸(テレスコ) スイング式ダブルハンド (5kg×2ヶ可搬) ※上下ストロークに対して、全高を抑えられます。 |